Source code: GitHub
![]()
![]()
...and follow me on Twitter: @eriknordeus
A Constrained Delaunay triangulation is a triangulation where we know that some edges exist in the triangulation. This can be useful if you for example want to make a hole in the mesh or make a navigation mesh for your game. We have earlier learned about the Delaunay Triangulation algorithm, and we will here learn how to improve it by making sure some edges exist in that triangulation. So make sure you have the code from that tutorial.
As usual there are more than one algorithms and I've here used one found in the report A fast algorithm for generating constrained delaunay triangulations so make sure you read it. That report is using another algorithm for the Delaunay triangulation but we can use the one we already have, so you can skip to the section "Algorithm for constructing a constrained delaunay triangulation" which is just about one page long. But the final code is about 700 rows so don't be fooled! Anyway, these are the steps in the algortihm
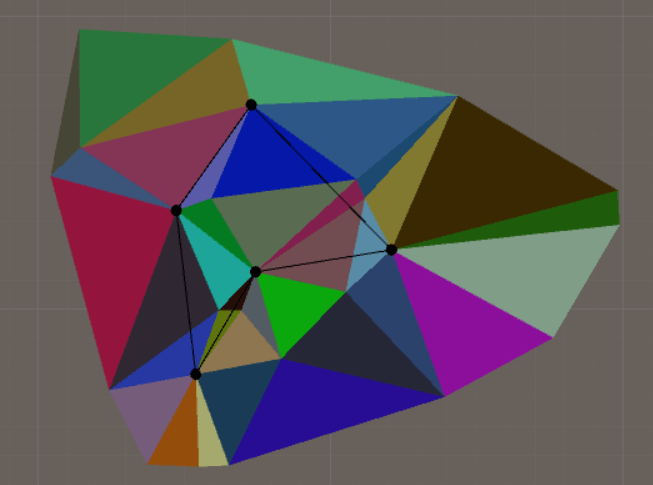
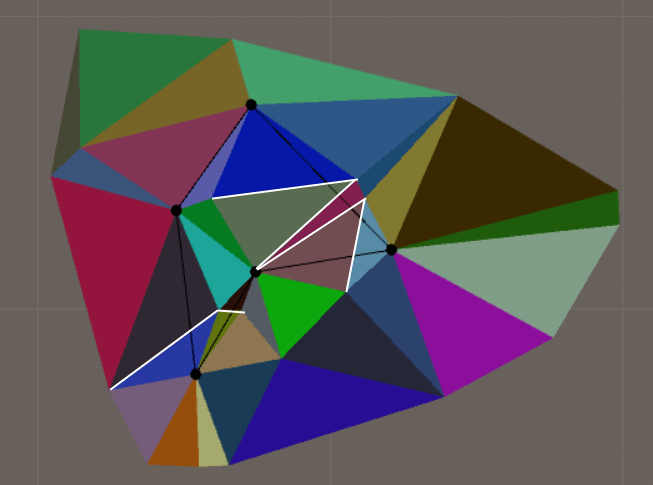
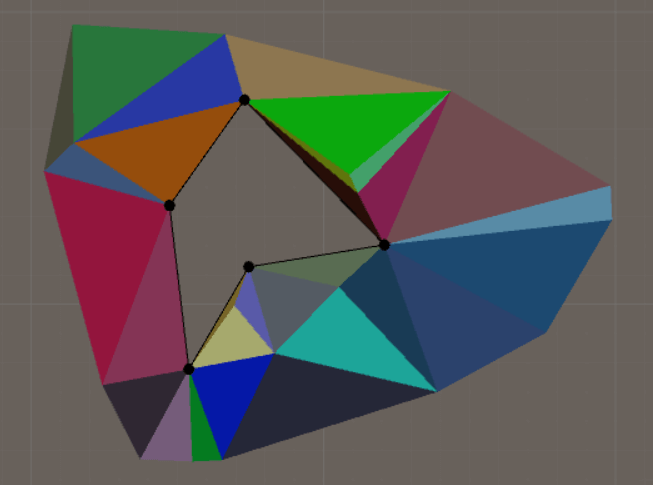
Step 1. Add the vertices that belongs to the constraints to the vertices we have and create a Delaunay triangulation. The vertices we already have in the image below are completely random, and the constraints are sorted clockwise, which will be useful later on.
...and all of this can be accomplished in just 700 lines of code (+ the code for the original Delaunay triangulation). To make the code work, you might need some algorithms from the "Useful algorithms" and "Are two line segments intersecting?" sections. And you might also need an extension method that easily converts a vector3 to a vector2 by removing the y value, which is what happens if you see .XZ().
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
public static class ConstrainedDelaunay
{
//From the report "An algorithm for generating constrained delaunay triangulations" by Sloan
public static List<Triangle> GenerateTriangulation(List<Vector3> points, List<Vector3> constraints)
{
//Start by generating a delaunay triangulation with all points, including the constraints
points.AddRange(constraints);
//This delaunay triangulation algorithm is not the same as in the report, but it makes no difference
List<Triangle> delaunayTriangulation = Delaunay.TriangulateByFlippingEdges(points);
//Modify the triangulation by adding the constraints to the delaunay triangulation
List<Triangle> constrainedDelaunayTriangulation = AddConstraints(delaunayTriangulation, constraints);
return constrainedDelaunayTriangulation;
}
//Add the constraints to the delaunay triangulation
private static List<Triangle> AddConstraints(List<Triangle> triangulation, List<Vector3> constraints)
{
//The steps numbering is from the report
//Step 1. Loop over each constrained edge. For each of these edges, do steps 2-4
for (int i = 0; i < constraints.Count; i++)
{
//Let each constrained edge be defined by the vertices:
Vector3 v_i = constraints[i];
Vector3 v_j = constraints[MathUtility.ClampListIndex(i + 1, constraints.Count)];
//Check if this constraint already exists in the triangulation, if so we are happy and dont need to worry about this edge
if (IsEdgePartOfTriangulation(triangulation, v_i, v_j))
{
continue;
}
//Step 2. Find all edges in the current triangulation that intersects with this constraint
List<HalfEdge> intersectingEdges = FindIntersectingEdges(triangulation, v_i, v_j);
//Step 3. Remove intersecting edges by adding new edges
List<HalfEdge> newEdges = RemoveIntersectingEdges(v_i, v_j, intersectingEdges);
//Step 4. Restore delaunay triangulation (if you want to)
RestoreDelaunayTriangulation(v_i, v_j, newEdges);
}
//Step 5. Remove superfluous triangles (if you need to)
RemoveSuperfluousTriangles(triangulation, constraints);
return triangulation;
}
//Remove edges that intersects with a constraint and add new edges
//The idea here is that all possible triangulations for a set of points can be found
//by systematically swapping the diagonal in each convex quadrilateral formed by a pair of triangles
//So we will test all possible arrangements and will always find a triangulation which includes the constrained edge
private static List<HalfEdge> RemoveIntersectingEdges(Vector3 v_i, Vector3 v_j, List<HalfEdge> intersectingEdges)
{
List<HalfEdge> newEdges = new List<HalfEdge>();
int safety = 0;
//While some edges still cross the constrained edge, do steps 3.1 and 3.2
while (intersectingEdges.Count > 0)
{
safety += 1;
if (safety > 10000)
{
Debug.Log("Stuck in infinite loop when fixing constrained edges");
break;
}
//Step 3.1. Remove an edge from the list of edges that intersects the constrained edge
HalfEdge e = intersectingEdges[0];
intersectingEdges.RemoveAt(0);
//The vertices belonging to the two triangles
Vector3 v_k = e.v.position;
Vector3 v_l = e.prevEdge.v.position;
Vector3 v_third_pos = e.nextEdge.v.position;
//The vertex belonging to the opposite triangle and isn't shared by the current edge
Vector3 v_opposite_pos = e.oppositeEdge.nextEdge.v.position;
//Step 3.2. If the two triangles that share the edge v_k and v_l do not form a convex quadtrilateral then place
//the edge back on the list of intersecting edges and go to step 3.1
if (!Geometry.IsQuadrilateralConvex(v_k.XZ(), v_l.XZ(), v_third_pos.XZ(), v_opposite_pos.XZ()))
{
intersectingEdges.Add(e);
continue;
}
else
{
//Flip the edge like we did when we created the delaunay triangulation so use the code from that class
Delaunay.FlipEdge(e);
//The new diagonal is defined by the vertices
Vector3 v_m = e.v.position;
Vector3 v_n = e.prevEdge.v.position;
//If this new diagonal intersects the constrained edge, add it to the list of intersecting edges
if (IsEdgeCrossingEdge(v_i, v_j, v_m, v_n))
{
intersectingEdges.Add(e);
}
//Place it in the list of newly created edges
else
{
newEdges.Add(e);
}
}
}
return newEdges;
}
//Try to restore the delaunay triangulation by flipping newly created edges
//This process is similar to when we created the original delaunay triangulation
//This step can maybe be skipped if you just want a triangulation and Ive noticed its often not flipping any triangles
private static void RestoreDelaunayTriangulation(Vector3 v_i, Vector3 v_j, List<HalfEdge> newEdges)
{
int safety = 0;
int flippedEdges = 0;
//Repeat 4.1 - 4.3 until no further swaps take place
while (true)
{
safety += 1;
if (safety > 100000)
{
Debug.Log("Stuck in endless loop when delaunay after fixing constrained edges");
break;
}
bool hasFlippedEdge = false;
//Step 4.1. Loop over each edge in the list of newly created edges
for (int j = 0; j < newEdges.Count; j++)
{
HalfEdge e = newEdges[j];
//Step 4.2. Let the newly created edge be defined by the vertices
Vector3 v_k = e.v.position;
Vector3 v_l = e.prevEdge.v.position;
//If this edge is equal to the constrained edge v_i and v_j, then skip to step 4.1
//because we are not allowed to flip a constrained edge
if ((v_k == v_i && v_l == v_j) || (v_l == v_i && v_k == v_j))
{
continue;
}
//Step 4.3. If the two triangles that share edge v_k and v_l don't satisfy the delaunay criterion,
//so that a vertex of one of the triangles is inside the circumcircle of the other triangle, flip the edge
//The third vertex of the triangle belonging to this edge
Vector3 v_third_pos = e.nextEdge.v.position;
//The vertice belonging to the triangle on the opposite side of the edge and this vertex is not a part of the edge
Vector3 v_opposite_pos = e.oppositeEdge.nextEdge.v.position;
float circleTestValue = Geometry.IsPointInsideOutsideOrOnCircle(v_k.XZ(), v_l.XZ(), v_third_pos.XZ(), v_opposite_pos.XZ());
if (circleTestValue < 0f)
{
//Are these the two triangles that share this edge forming a convex quadrilateral? Otherwise the edge cant be flipped
if (Geometry.IsQuadrilateralConvex(v_k.XZ(), v_l.XZ(), v_third_pos.XZ(), v_opposite_pos.XZ()))
{
//If the new triangle after a flip is not better, then dont flip
if (Geometry.IsPointInsideOutsideOrOnCircle(v_opposite_pos.XZ(), v_l.XZ(), v_third_pos.XZ(), v_k.XZ()) <= circleTestValue)
{
continue;
}
//Flip the edge
hasFlippedEdge = true;
Delaunay.FlipEdge(e);
flippedEdges += 1;
}
}
}
//We have searched through all edges and havent found an edge to flip, so we cant improve anymore
if (!hasFlippedEdge)
{
Debug.Log("Found a constrained delaunay triangulation in " + flippedEdges + " flips");
break;
}
}
}
//Remove all triangles that are inside the constraint
//This assumes the vertices in the constraint are ordered clockwise
private static void RemoveSuperfluousTriangles(List<Triangle> triangulation, List<Vector3> constraints)
{
//This assumes we have at least 3 vertices in the constraint because we cant delete triangles inside a line
if (constraints.Count < 3)
{
return;
}
//Start at a triangle with an edge that shares an edge with the first constraint edge in the list
//Since both are clockwise we know we are "inside" of the constraint, so this is a triangle we should delete
Triangle borderTriangle = null;
Vector3 constrained_p1 = constraints[0];
Vector3 constrained_p2 = constraints[1];
for (int i = 0; i < triangulation.Count; i++)
{
HalfEdge e1 = triangulation[i].halfEdge;
HalfEdge e2 = e1.nextEdge;
HalfEdge e3 = e2.nextEdge;
//Is any of these edges a constraint?
if (e1.v.position == constrained_p2 && e1.prevEdge.v.position == constrained_p1)
{
borderTriangle = triangulation[i];
break;
}
if (e2.v.position == constrained_p2 && e2.prevEdge.v.position == constrained_p1)
{
borderTriangle = triangulation[i];
break;
}
if (e3.v.position == constrained_p2 && e3.prevEdge.v.position == constrained_p1)
{
borderTriangle = triangulation[i];
break;
}
}
if (borderTriangle == null)
{
return;
}
//Find all triangles within the constraint by using a flood fill algorithm
//Add these triangles should be deleted
List<Triangle> trianglesToBeDeleted = new List<Triangle>();
List<Triangle> neighborsToCheck = new List<Triangle>();
//Start at the triangle we know is within the constraints
neighborsToCheck.Add(borderTriangle);
int safety = 0;
while (true)
{
safety += 1;
if (safety > 10000)
{
Debug.Log("Stuck in infinite loop when deleteing superfluous triangles");
break;
}
//Stop if we are out of neighbors
if (neighborsToCheck.Count == 0)
{
break;
}
//Pick the first triangle in the list and investigate its neighbors
Triangle t = neighborsToCheck[0];
neighborsToCheck.RemoveAt(0);
trianglesToBeDeleted.Add(t);
HalfEdge e1 = t.halfEdge;
HalfEdge e2 = e1.nextEdge;
HalfEdge e3 = e2.nextEdge;
//If the neighbor is not an outer border meaning no neighbor exists
//If we have not already visited the neighbor
//If the edge between the neighbor and this triangle is not a constraint
//Then its a valid neighbor and we should flood to it
if (
e1.oppositeEdge != null &&
!trianglesToBeDeleted.Contains(e1.oppositeEdge.t) &&
!neighborsToCheck.Contains(e1.oppositeEdge.t) &&
!IsAnEdgeAConstraint(e1.v.position, e1.prevEdge.v.position, constraints))
{
neighborsToCheck.Add(e1.oppositeEdge.t);
}
if (
e2.oppositeEdge != null &&
!trianglesToBeDeleted.Contains(e2.oppositeEdge.t) &&
!neighborsToCheck.Contains(e2.oppositeEdge.t) &&
!IsAnEdgeAConstraint(e2.v.position, e2.prevEdge.v.position, constraints))
{
neighborsToCheck.Add(e2.oppositeEdge.t);
}
if (
e3.oppositeEdge != null &&
!trianglesToBeDeleted.Contains(e3.oppositeEdge.t) &&
!neighborsToCheck.Contains(e3.oppositeEdge.t) &&
!IsAnEdgeAConstraint(e3.v.position, e3.prevEdge.v.position, constraints))
{
neighborsToCheck.Add(e3.oppositeEdge.t);
}
}
//Delete the triangles
for (int i = 0; i < trianglesToBeDeleted.Count; i++)
{
Triangle t = trianglesToBeDeleted[i];
//Remove from the list of all triangles
triangulation.Remove(t);
//In the half-edge data structure there's an edge going in the opposite direction
//on the other side of this triangle with a reference to this edge, so we have to remove these
HalfEdge t_e1 = t.halfEdge;
HalfEdge t_e2 = t_e1.nextEdge;
HalfEdge t_e3 = t_e2.nextEdge;
if (t_e1.oppositeEdge != null)
{
t_e1.oppositeEdge.oppositeEdge = null;
}
if (t_e2.oppositeEdge != null)
{
t_e2.oppositeEdge.oppositeEdge = null;
}
if (t_e3.oppositeEdge != null)
{
t_e3.oppositeEdge.oppositeEdge = null;
}
}
}
//Is an edge between p1 and p2 a constraint?
private static bool IsAnEdgeAConstraint(Vector3 p1, Vector3 p2, List<Vector3> constraints)
{
for (int i = 0; i < constraints.Count; i++)
{
Vector3 c_p1 = constraints[i];
Vector3 c_p2 = constraints[MathUtility.ClampListIndex(i + 1, constraints.Count)];
if ((p1 == c_p1 && p2 == c_p2) || (p2 == c_p1 && p1 == c_p2))
{
return true;
}
}
return false;
}
//Find all edges of the current triangulation that intersects with the constraint edge between p1 and p2
private static List<HalfEdge> FindIntersectingEdges(List<Triangle> triangulation, Vector3 p1, Vector3 p2)
{
List<HalfEdge> intersectingEdges = new List<HalfEdge>();
//Loop through all edges and see if they are intersecting with the constrained edge
//for (int i = 0; i < triangulation.Count; i++)
//{
// //The edges the triangle consists of
// HalfEdge e1 = triangulation[i].halfEdge;
// HalfEdge e2 = e1.nextEdge;
// HalfEdge e3 = e2.nextEdge;
// TryAddEdgeToIntersectingEdges(e1, p1, p2, intersectingEdges);
// TryAddEdgeToIntersectingEdges(e2, p1, p2, intersectingEdges);
// TryAddEdgeToIntersectingEdges(e3, p1, p2, intersectingEdges);
//}
//While the above is working, a faster (but more complicated) way is to do a triangle walk which is suggested in the report
//Step 1. Begin at a triangle connected to the first vertex in the constraint edge
Triangle t = null;
for (int i = 0; i < triangulation.Count; i++)
{
//The edges the triangle consists of
HalfEdge e1 = triangulation[i].halfEdge;
HalfEdge e2 = e1.nextEdge;
HalfEdge e3 = e2.nextEdge;
//Does one of these edges include the first vertex in the constraint edge
if (e1.v.position == p1 || e2.v.position == p1 || e3.v.position == p1)
{
t = triangulation[i];
break;
}
}
//Step2. Walk around p1 until we find a triangle with an edge that intersects with the edge p1-p2
int safety = 0;
//This is the last edge on the previous triangle we crossed so we know which way to rotatet
HalfEdge lastEdge = null;
//When we rotate we might pick the wrong start direction if the edge is on the border, so we can't rotate all the way around
//If that happens we have to restart and rotate in the other direction
Triangle startTriangle = t;
bool restart = false;
while (true)
{
safety += 1;
if (safety > 10000)
{
Debug.Log("Stuck in infinite loop when finding the start triangle when finding intersecting edges");
break;
}
//Check if the current triangle is intersecting with the constraint
HalfEdge e1 = t.halfEdge;
HalfEdge e2 = e1.nextEdge;
HalfEdge e3 = e2.nextEdge;
//The only edge that can intersect with the constraint is the edge that doesnt include p1, so find it
HalfEdge e_doesnt_include_p1 = null;
if (e1.v.position != p1 && e1.prevEdge.v.position != p1)
{
e_doesnt_include_p1 = e1;
}
else if (e2.v.position != p1 && e2.prevEdge.v.position != p1)
{
e_doesnt_include_p1 = e2;
}
else
{
e_doesnt_include_p1 = e3;
}
//Is the edge that doesn't include p1 intersecting with the constrained edge?
if (IsEdgeCrossingEdge(e_doesnt_include_p1.v.position, e_doesnt_include_p1.prevEdge.v.position, p1, p2))
{
//We have found the triangle where we should begin the walk
break;
}
//We have not found the triangle where we should begin the walk, so we should rotate to another triangle which includes p1
//Find the two edges that include p1 so we can rotate across one of them
List<HalfEdge> includes_p1 = new List<HalfEdge>();
if (e1 != e_doesnt_include_p1)
{
includes_p1.Add(e1);
}
if (e2 != e_doesnt_include_p1)
{
includes_p1.Add(e2);
}
if (e3 != e_doesnt_include_p1)
{
includes_p1.Add(e3);
}
//This is the first rotation we do from the triangle we found at the start, so we rotate in a direction
if (lastEdge == null)
{
//But if we are on the border of the triangulation we cant just pick a direction because one of the
//directions might not be valid and end up outside of the triangulation
//This problem could be solved if we add a "supertriangle" covering all points
lastEdge = includes_p1[0];
//Dont go in this direction because then we are outside of the triangulation
//Sometimes we may have picked the wrong direction when we rotate from the first triangle
//and rotated around towards a triangle that's at the border, if so we have to restart and rotate
//in the other direction
if (lastEdge.oppositeEdge == null || restart)
{
lastEdge = includes_p1[1];
}
//The triangle we rotate to
t = lastEdge.oppositeEdge.t;
}
else
{
//Move in the direction that doesnt include the last edge
if (includes_p1[0].oppositeEdge != lastEdge)
{
lastEdge = includes_p1[0];
}
else
{
lastEdge = includes_p1[1];
}
//If we have hit a border edge, we should have rotated in the other direction when we started at the first triangle
//So we have to jump back
if (lastEdge.oppositeEdge == null)
{
restart = true;
t = startTriangle;
lastEdge = null;
}
else
{
//The triangle we rotate to
t = lastEdge.oppositeEdge.t;
}
}
}
//Step3. March from one triangle to the next in the general direction of p2
//This means we always move across the edge of the triangle that intersects with the constraint
int safety2 = 0;
lastEdge = null;
while (true)
{
safety2 += 1;
if (safety2 > 10000)
{
Debug.Log("Stuck in infinite loop when finding intersecting edges");
break;
}
//The three edges belonging to the current triangle
HalfEdge e1 = t.halfEdge;
HalfEdge e2 = e1.nextEdge;
HalfEdge e3 = e2.nextEdge;
//Does this triangle include the last vertex on the constraint edge? If so we have found all edges that intersects
if (e1.v.position == p2 || e2.v.position == p2 || e3.v.position == p2)
{
break;
}
//Find which edge that intersects with the constraint
//More than one edge maight intersect, so we have to check if it's not the edge we are coming from
else
{
//Save the edge that intersects in case the triangle intersects with two edges
if (e1.oppositeEdge != lastEdge && IsEdgeCrossingEdge(e1.v.position, e1.prevEdge.v.position, p1, p2))
{
lastEdge = e1;
}
else if (e2.oppositeEdge != lastEdge && IsEdgeCrossingEdge(e2.v.position, e2.prevEdge.v.position, p1, p2))
{
lastEdge = e2;
}
else
{
lastEdge = e3;
}
//Jump to the next triangle by crossing the edge that intersects with the constraint
t = lastEdge.oppositeEdge.t;
//Save the intersecting edge
intersectingEdges.Add(lastEdge);
}
}
return intersectingEdges;
}
//Check if an edge is intersecting with the constraint edge between p1 and p2
//If so, add it to the list if the edge doesnt exist in the list
private static void TryAddEdgeToIntersectingEdges(HalfEdge e, Vector3 p1, Vector3 p2, List<HalfEdge> intersectingEdges)
{
//The position the edge is going to
Vector3 e_p1 = e.v.position;
//The position the edge is coming from
Vector3 e_p2 = e.prevEdge.v.position;
//Is this edge intersecting with the constraint?
if (IsEdgeCrossingEdge(e_p1, e_p2, p1, p2))
{
//Add it to the list if it isnt already in the list
for (int i = 0; i < intersectingEdges.Count; i++)
{
//In the half-edge data structure, theres another edge on the opposite side going in the other direction
//so we have to check both because we want unique edges
if (intersectingEdges[i] == e || intersectingEdges[i].oppositeEdge == e)
{
//The edge is already in the list
return;
}
}
//The edge is not in the list so add it
intersectingEdges.Add(e);
}
}
//Is an edge crossing another edge?
private static bool IsEdgeCrossingEdge(Vector3 e1_p1, Vector3 e1_p2, Vector3 e2_p1, Vector3 e2_p2)
{
//We will here run into floating point precision issues so we have to be careful
//To solve that you can first check the end points
//and modify the line-line intersection algorithm to include a small epsilon
//First check if the edges are sharing a point, if so they are not crossing
if (e1_p1 == e2_p1 || e1_p1 == e2_p2 || e1_p2 == e2_p1 || e1_p2 == e2_p2)
{
return false;
}
//Then check if the lines are intersecting
if (!Intersections.AreLinesIntersecting(e1_p1.XZ(), e1_p2.XZ(), e2_p1.XZ(), e2_p2.XZ(), false))
{
return false;
}
return true;
}
//Is an edge (between p1 and p2) a part of an edge in the triangulation?
private static bool IsEdgePartOfTriangulation(List<Triangle> triangulation, Vector3 p1, Vector3 p2)
{
for (int i = 0; i < triangulation.Count; i++)
{
//The vertices positions of the current triangle
Vector3 t_p1 = triangulation[i].v1.position;
Vector3 t_p2 = triangulation[i].v2.position;
Vector3 t_p3 = triangulation[i].v3.position;
//Check if any of the triangle's edges have the same coordinates as the constrained edge
//We have no idea about direction so we have to check both directions
if ((t_p1 == p1 && t_p2 == p2) || (t_p1 == p2 && t_p2 == p1))
{
return true;
}
if ((t_p2 == p1 && t_p3 == p2) || (t_p2 == p2 && t_p3 == p1))
{
return true;
}
if ((t_p3 == p1 && t_p1 == p2) || (t_p3 == p2 && t_p1 == p1))
{
return true;
}
}
return false;
}
}
The author of the report added a few optimizations to make the algorithm faster. For example, the report suggested that you should "rotate" triangle (in the same way as when we found intersections with the constraints) to find if a constraint already exists in the triangulation. But 700 lines of code is enough and it will make the tutorial more and more complicated, so I've ignored that optimization. If you think this algortihm is too slow, you can add it.
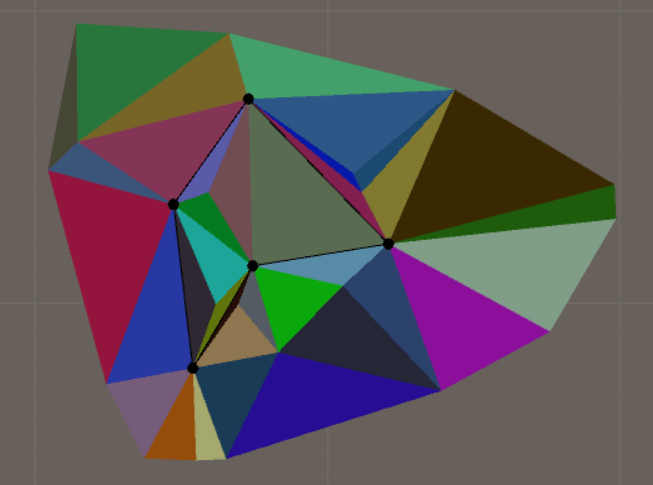
And if everything is working fine you should be able to do this: