Source code: GitHub
![]()
![]()
...and follow me on Twitter: @eriknordeus
To make a realistic looking rope we will approximate the rope with several connected springs. Each spring is subjected to the following forces (you may remove some if you like but you will need the spring force):
To calculate the spring force and the rope friction force, we will use an equation from the book Physics for Game Developers. So each update we have to calculate these four forces. Each spring section is affected by not one but two spring forces: one from above and one from below. When we have calculated the total force on each section, we need to find the acceleration in each section, by using F = ma. Now when we have the acceleration, we can find the position of the spring next update by using a numerical method.
There are several numerical methods, but the most basic one is Forward Euler. It's working like this: If we know the acceleration, the start position, and start velocity, then we can find the position and velocity next update. We know each rope section's acceleration (by using F = ma), position, and velocity, so we can find each rope section's position next update this way:
...and then we just run Forward Euler each FixedUpdate() and the rope will swing back and forth. That wasn't difficult was it?
You will notice if you want to make a less bouncy rope by increasing the spring constant, the rope simulation will explode. Why? Because each time you use Forward Euler, you will get a small error, and this error will grow as the numbers get larger. To solve this you can lower the time_step and just simulate everything several times each FixedUpdate(). Another solution is to use a more accurate numerical method, such as Improved Euler (also known as Heun's method). It looks like this:
...so to make Heun's method work you first have to calculate everything by using Forward Euler like you did before, then use the values from Forward Euler to again calculate the accelerations in each spring section, and then use those values in Heun's method to get an average. By changing the time_step and by using Heun's method, you will be able to make a less bouncy rope. But this will not be enough because sometimes the rope simulation will still explode.
Another solution to this problem is called maximum stretch. The idea behind maximum stretch is that you only allow each spring to stretch or compress a certain amount. If, for example, a spring is longer than 10% of the length of the rope section, then move the spring back to the length it should have if it was stretched 10%. This is a method you may have to run several times because if you move one spring section, then the other sections should move with it.
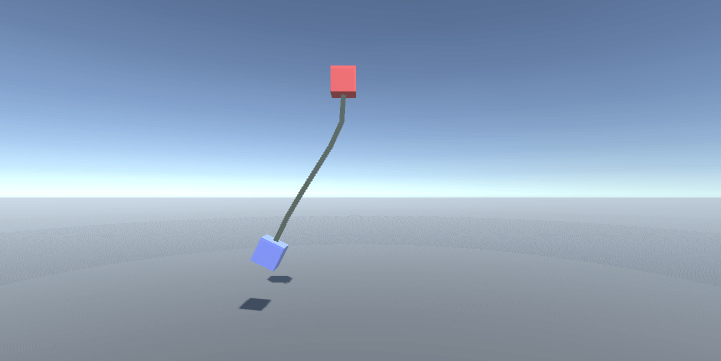
To make this work you need two boxes. The rope will be attached to one of these boxes and the other box will simply hang from the rope. Then add the following script to a gameobject which has a line renderer attached to it:
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
public class RopeControllerRealistic : MonoBehaviour
{
//Objects that will interact with the rope
public Transform whatTheRopeIsConnectedTo;
public Transform whatIsHangingFromTheRope;
//Line renderer used to display the rope
LineRenderer lineRenderer;
//A list with all rope section
public List<RopeSection> allRopeSections = new List<RopeSection>();
//Rope data
private float ropeSectionLength = 1f;
//Data we can change to change the properties of the rope
//Spring constant
public float kRope = 40f;
//Damping from rope friction constant
public float dRope = 2f;
//Damping from air resistance constant
public float aRope = 0.05f;
//Mass of one rope section
public float mRopeSection = 0.2f;
void Start()
{
//Init the line renderer we use to display the rope
lineRenderer = GetComponent<LineRenderer>();
//
//Create the rope
//
//Build the rope from the top
Vector3 pos = whatTheRopeIsConnectedTo.position;
List<Vector3> ropePositions = new List<Vector3>();
for (int i = 0; i < 7; i++)
{
ropePositions.Add(pos);
pos.y -= ropeSectionLength;
}
//But add the rope sections from bottom because it's easier to add
//more sections to it if we have a winch
for (int i = ropePositions.Count - 1; i >= 0; i--)
{
allRopeSections.Add(new RopeSection(ropePositions[i]));
}
}
void Update()
{
//Display the rope with the line renderer
DisplayRope();
//Compare the current length of the rope with the wanted length
DebugRopeLength();
//Move what is hanging from the rope to the end of the rope
whatIsHangingFromTheRope.position = allRopeSections[0].pos;
//Make what's hanging from the rope look at the next to last rope position to make it rotate with the rope
whatIsHangingFromTheRope.LookAt(allRopeSections[1].pos);
}
void FixedUpdate()
{
if (allRopeSections.Count > 0)
{
//Simulate the rope
//How accurate should the simulation be?
int iterations = 1;
//Time step
float timeStep = Time.fixedDeltaTime / (float)iterations;
for (int i = 0; i < iterations; i++)
{
UpdateRopeSimulation(allRopeSections, timeStep);
}
}
}
//Display the rope with a line renderer
private void DisplayRope()
{
float ropeWidth = 0.2f;
lineRenderer.startWidth = ropeWidth;
lineRenderer.endWidth = ropeWidth;
//An array with all rope section positions
Vector3[] positions = new Vector3[allRopeSections.Count];
for (int i = 0; i < allRopeSections.Count; i++)
{
positions[i] = allRopeSections[i].pos;
}
lineRenderer.numPositions = positions.Length;
lineRenderer.SetPositions(positions);
}
private void UpdateRopeSimulation(List<RopeSection> allRopeSections, float timeStep)
{
//Move the last position, which is the top position, to what the rope is attached to
RopeSection lastRopeSection = allRopeSections[allRopeSections.Count - 1];
lastRopeSection.pos = whatTheRopeIsConnectedTo.position;
allRopeSections[allRopeSections.Count - 1] = lastRopeSection;
//
//Calculate the next pos and vel with Forward Euler
//
//Calculate acceleration in each rope section which is what is needed to get the next pos and vel
List<Vector3> accelerations = CalculateAccelerations(allRopeSections);
List<RopeSection> nextPosVelForwardEuler = new List<RopeSection>();
//Loop through all line segments (except the last because it's always connected to something)
for (int i = 0; i < allRopeSections.Count - 1; i++)
{
RopeSection thisRopeSection = RopeSection.zero;
//Forward Euler
//vel = vel + acc * t
thisRopeSection.vel = allRopeSections[i].vel + accelerations[i] * timeStep;
//pos = pos + vel * t
thisRopeSection.pos = allRopeSections[i].pos + allRopeSections[i].vel * timeStep;
//Save the new data in a temporarily list
nextPosVelForwardEuler.Add(thisRopeSection);
}
//Add the last which is always the same because it's attached to something
nextPosVelForwardEuler.Add(allRopeSections[allRopeSections.Count - 1]);
//
//Calculate the next pos with Heun's method (Improved Euler)
//
//Calculate acceleration in each rope section which is what is needed to get the next pos and vel
List<Vector3> accelerationFromEuler = CalculateAccelerations(nextPosVelForwardEuler);
List<RopeSection> nextPosVelHeunsMethod = new List<RopeSection>>();
//Loop through all line segments (except the last because it's always connected to something)
for (int i = 0; i < allRopeSections.Count - 1; i++)
{
RopeSection thisRopeSection = RopeSection.zero;
//Heuns method
//vel = vel + (acc + accFromForwardEuler) * 0.5 * t
thisRopeSection.vel = allRopeSections[i].vel + (accelerations[i] + accelerationFromEuler[i]) * 0.5f * timeStep;
//pos = pos + (vel + velFromForwardEuler) * 0.5f * t
thisRopeSection.pos = allRopeSections[i].pos + (allRopeSections[i].vel + nextPosVelForwardEuler[i].vel) * 0.5f * timeStep;
//Save the new data in a temporarily list
nextPosVelHeunsMethod.Add(thisRopeSection);
}
//Add the last which is always the same because it's attached to something
nextPosVelHeunsMethod.Add(allRopeSections[allRopeSections.Count - 1]);
//From the temp list to the main list
for (int i = 0; i < allRopeSections.Count; i++)
{
allRopeSections[i] = nextPosVelHeunsMethod[i];
//allRopeSections[i] = nextPosVelForwardEuler[i];
}
//Implement maximum stretch to avoid numerical instabilities
//May need to run the algorithm several times
int maximumStretchIterations = 2;
for (int i = 0; i < maximumStretchIterations; i++)
{
ImplementMaximumStretch(allRopeSections);
}
}
//Calculate accelerations in each rope section which is what is needed to get the next pos and vel
private List<Vector3> CalculateAccelerations(List<RopeSection> allRopeSections)
{
List<Vector3> accelerations = new List<Vector3>();
//Spring constant
float k = kRope;
//Damping constant
float d = dRope;
//Damping constant from air resistance
float a = aRope;
//Mass of one rope section
float m = mRopeSection;
//How long should the rope section be
float wantedLength = ropeSectionLength;
//Calculate all forces once because some sections are using the same force but negative
List<Vector3> allForces = new List<Vector3>();
for (int i = 0; i < allRopeSections.Count - 1; i++)
{
//From Physics for game developers book
//The force exerted on body 1
//pos1 (above) - pos2
Vector3 vectorBetween = allRopeSections[i + 1].pos - allRopeSections[i].pos;
float distanceBetween = vectorBetween.magnitude;
Vector3 dir = vectorBetween.normalized;
float springForce = k * (distanceBetween - wantedLength);
//Damping from rope friction
//vel1 (above) - vel2
float frictionForce = d * ((Vector3.Dot(allRopeSections[i + 1].vel - allRopeSections[i].vel, vectorBetween)) / distanceBetween);
//The total force on the spring
Vector3 springForceVec = -(springForce + frictionForce) * dir;
//This is body 2 if we follow the book because we are looping from below, so negative
springForceVec = -springForceVec;
allForces.Add(springForceVec);
}
//Loop through all line segments (except the last because it's always connected to something)
//and calculate the acceleration
for (int i = 0; i < allRopeSections.Count - 1; i++)
{
Vector3 springForce = Vector3.zero;
//Spring 1 - above
springForce += allForces[i];
//Spring 2 - below
//The first spring is at the bottom so it doesnt have a section below it
if (i != 0)
{
springForce -= allForces[i - 1];
}
//Damping from air resistance, which depends on the square of the velocity
float vel = allRopeSections[i].vel.magnitude;
Vector3 dampingForce = a * vel * vel * allRopeSections[i].vel.normalized;
//The mass attached to this spring
float springMass = m;
//end of the rope is attached to a box with a mass
if (i == 0)
{
springMass += whatIsHangingFromTheRope.GetComponent<Rigidbody>().mass;
}
//Force from gravity
Vector3 gravityForce = springMass * new Vector3(0f, -9.81f, 0f);
//The total force on this spring
Vector3 totalForce = springForce + gravityForce - dampingForce;
//Calculate the acceleration a = F / m
Vector3 acceleration = totalForce / springMass;
accelerations.Add(acceleration);
}
//The last line segment's acc is always 0 because it's attached to something
accelerations.Add(Vector3.zero);
return accelerations;
}
//Implement maximum stretch to avoid numerical instabilities
private void ImplementMaximumStretch(List<RopeSection> allRopeSections)
{
//Make sure each spring are not less compressed than 90% nor more stretched than 110%
float maxStretch = 1.1f;
float minStretch = 0.9f;
//Loop from the end because it's better to adjust the top section of the rope before the bottom
//And the top of the rope is at the end of the list
for (int i = allRopeSections.Count - 1; i > 0; i--)
{
RopeSection topSection = allRopeSections[i];
RopeSection bottomSection = allRopeSections[i - 1];
//The distance between the sections
float dist = (topSection.pos - bottomSection.pos).magnitude;
//What's the stretch/compression
float stretch = dist / ropeSectionLength;
if (stretch > maxStretch)
{
//How far do we need to compress the spring?
float compressLength = dist - (ropeSectionLength * maxStretch);
//In what direction should we compress the spring?
Vector3 compressDir = (topSection.pos - bottomSection.pos).normalized;
Vector3 change = compressDir * compressLength;
MoveSection(change, i - 1);
}
else if (stretch < minStretch)
{
//How far do we need to stretch the spring?
float stretchLength = (ropeSectionLength * minStretch) - dist;
//In what direction should we compress the spring?
Vector3 stretchDir = (bottomSection.pos - topSection.pos).normalized;
Vector3 change = stretchDir * stretchLength;
MoveSection(change, i - 1);
}
}
}
//Move a rope section based on stretch/compression
private void MoveSection(Vector3 finalChange, int listPos)
{
RopeSection bottomSection = allRopeSections[listPos];
//Move the bottom section
Vector3 pos = bottomSection.pos;
pos += finalChange;
bottomSection.pos = pos;
allRopeSections[listPos] = bottomSection;
}
//Compare the current length of the rope with the wanted length
private void DebugRopeLength()
{
float currentLength = 0f;
for (int i = 1; i < allRopeSections.Count; i++)
{
float thisLength = (allRopeSections[i].pos - allRopeSections[i - 1].pos).magnitude;
currentLength += thisLength;
}
float wantedLength = ropeSectionLength * (float)(allRopeSections.Count - 1);
print("Wanted: " + wantedLength + " Actual: " + currentLength);
}
}
You also need a script that will keep track of each rope section:
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
//A class that will hold information about each rope section
public struct RopeSection
{
public Vector3 pos;
public Vector3 vel;
//To write RopeSection.zero
public static readonly RopeSection zero = new RopeSection(Vector3.zero);
public RopeSection(Vector3 pos)
{
this.pos = pos;
this.vel = Vector3.zero;
}
}
If you now move the box the rope is attached to then the rope should swing back and forth.
To sum up, these are the parameters you can change:
If your spring constant is high (if you have a steel wire), then you will notice that no matter what you change the rope will explode (or the simulation will be really slow). To solve this, we will make a simplified rope in the next section with far fewer parameters.